

社会貢献・地域連携
高大連携サマーセミナー 2007
三重大学工学部 物理工学科 高大連携サマーセミナー
--- LEGOロボット競技会 2007 ---
セミナーの開催日
平成19年8月2日(木)~8月4日(土)
セミナーの開催場所
三重大学工学部 情報工学科棟 1階 多目的会議室
セミナーの課題
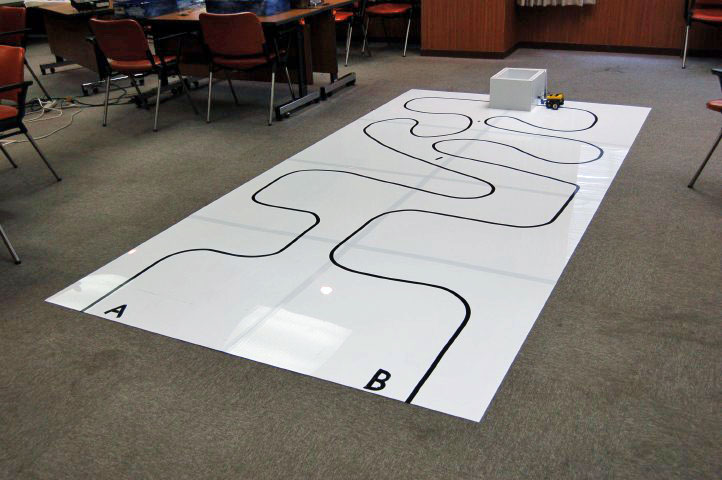
ラインとレース
- 予選
- コース上に設置されたA,B,いずれかのコースを選択し,1回の試技を行い,ゴールに入れたボールの個数を競うものとする.
- ボールはスタート時に30個まで搭載することができる.
- ボールの個数が同数の場合は,ゴールに到達した時間の短い方を優先するものとする.
- コースを大きく逸脱した場合は失格とする(逸脱しても元の場所に復帰できた場合は失格としない)
- 決勝トーナメント
- A,B両コースから2チームが同時スタートする(スタート音以降であれば,戦略上スタートを遅らせても良い).
- 勝敗の決定は予選と同じ基準とする.
- コースを入れ替え,2試合実施する.
- 同点の場合は,サドンデス方式で延長戦を実施する.
予選
- 予選第1位 準優勝
- 予選第2位 優勝
- 予選第3位
- 予選第4位
- 予選第4位
チーム名:red
スコア:30
タイム:2分27秒
チーム名:white
スコア:30
タイム:2分49秒

チーム名:green
スコア:18
タイム:1分49秒
チーム名:yellow
スコア:0
タイム:0

チーム名:blue
スコア:0
タイム:0
決勝トーナメント
- 結果
- 決勝第1位 優勝
- 決勝第2位 準優勝
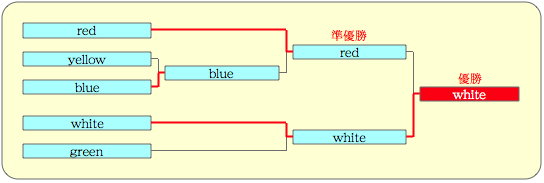
チーム名:white
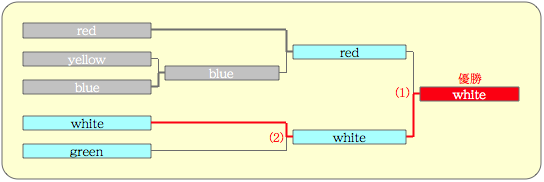
(1) 決勝 MPEG-1 movie
(2) 準決勝 MPEG-1 movie
チーム名:red
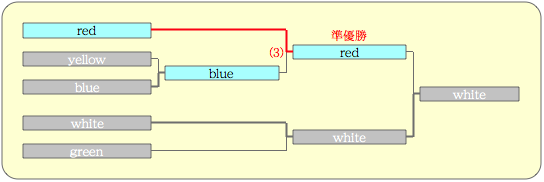
(3) 準決勝 MPEG-1 movie
チーム名:blue
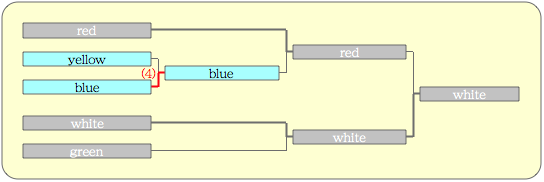
(4) 準々決勝 MPEG-1 movie
参加者アンケート
-
本当に正直に言うと,大学に来てオモチャのロボットかよと思いました.でも,作っていく中で悩んだり,成功して喜んだり,試行錯誤のうちにだんだん楽しくなってきました.それ だけじゃなくて,勝ちたいと思うようになっていきました.
自分はロボットの形を作るのはあまりしなくて,パソコンを使ってプログラムを作る方を中心にやっていたけど,それがすごく難しくて,TAの人に教えられてばっかでした.けど,やっていくうちに理解できてきて,今ではチームの中で1番プログラムがうまいという自信もあります.
3日間,今思うとすごく短かった気がします.それほど自分が熱中していたのかなぁと終わってから気付かされました. -
ロボットは,とても難しいと思いました.指示するのが複雑で,組み立てるのと違ってやりにくかったです.自分はほとんどロボット製作をしていました.玉の落とし方もダイナミックなものを考えました.でも,そういうのをするのはすべてパソコンで指示しなくてはいけません.今日は友達やTAの人がほとんどやってくれましたが,次は自分でやりたいです.
とても面白かったので,また来年もやってほしいくらいです.また今度もよろしくお願いします. -
白熱した.初日の競技会は熱気でクラクラしたが,出場ロボの一つに注目し,二日目からの自由製作に活用した.
小学校以来にレゴで本格的な物を作ったが,妙に興奮して,夢中に製作に取り組んだ.ほとんど分からなかったが,学生の方からの助言や,同じ班の人の発想で完成することが出来た.なつかしさと楽しさで一杯だった.
教授のみなさんには,この感情をより多くの子供達に教えていってもらいたいです.これを期に工学に対する熱意が更に増した.今年は是非三重大に入ろうと思います.
とても面白かった.MINDSTORMSを買って家でやってみたい. - パーツが少ない.
誤作動が多かった.
センサーの感度があまりよくなかった.
先輩たちの作った作品がすごいとわかった.
勝てなくて残念だった.
あまりオリジナル性を追求できなかった.
moru(??)はいい作品だった./*ここ意味が分からなかったです*/ - 食堂の唐揚豚骨ラーメンがものすごくおいしかったので,将来はこの三重大に進学したい.
サマーセミナーはまた今度もあれば参加したい.
残念なところとしては大学だけあって,ちょっとタバコくさかった. - 光センサーがうまくできなかったし,ボールもうまく入らなかったけど楽しかった.けっこう時間を忘れて夢中になれた.
- 楽しくできたけど一度もゴールにボールを入れられなくて残念でした.
みんなの作っていたマシーンは変わっていて,自分では思いつきそうに無いものばかりでした. - ロボット作りは予想していたのとまったく違いました.
1日目は説明を聞いてロボット作りがレゴを使ってやると知ってうれしかったです.
レゴは小さい頃によく作って遊んだので使いやすかったです.
競技会もすごかったです.
でも小さいころ使ったのとはまったく違う難しいレゴでした.
パソコンを使って動きを決めたりなどして作るレゴは初めてでした.
自分たちで考えて作るのは大変でした.
造っている最中にロボットを作ることの難しさを学びました.
競技会はロボットがいつ倒れるかで不安だったけど優勝してうれしかったです.
僕は文系で先生に進められてきました.
文系なので工学部とは無関係だったけどロボット作りに参加できてよかったです.
いい経験になり楽しかったです.
前までは工学部が良かったですけど.
三重大生はすごいと思いました.お世話になりました. - レゴはもう小さい子の遊びだと思っていたが,ひさしぶりにやったら楽しかった.
簡単そうに見えたプログラミングだけど,やってみると難しかった. - 三日間に渡って参加した物理工学ゼミの中でLEGOを作っている時が一番楽しかったです.
あっという間に時間が過ぎたというように思うほど充実したものでした.
それぞれの班の作品は個性的で,僕自身,とてもよい体験が出来たと感じます.
ますます三重大に入りたいという気持ちが強くなりました. - 最後まできちんとゴールできなかったので悔しいです.
しかし,はじめてロボットをつくって楽しかったです. - 想像以上に難しい作業ばっかりで苦労した.
工学部の棟まで遠いから来るのがつらかった.
一日目の説明は眠かった.
正直言うと,自分はまったく興味のない分野だったけど,いざ参加してみると,楽しかった.
食堂に行くと学生さんたちがみんな生き生きしているなあと思った.
大学は楽しいところなんだな,と分かった.
食堂で食べながら勉強しているのには驚いた. - ロボットを作るのにもすごい時間がかかるし,自分たちが思っている方向へ進まなかった(かなり難しかった).
他のグループもとてもそれぞれで競技会は初めてでも楽しかった.
講評
- 野呂雄一
- 競技会用ロボットについて
- 最後に 2日間のロボット製作でしたが,皆さんはどのような感想を持ちましたか? 結構熱中している自分を発見したのではないでしょうか? おもちゃを目の前にして,何か作ってみようという小さい頃の好奇心あるいは衝動のような感覚を思い出した人もいるかと思いますが,その感覚を是非大事にしてください. 実は「ロボットのしくみと動かし方」を習得することよりも,その感覚を思い出してもらうことの方が私は重要だと思っています.材料や道具が与えられて何か作ってみようというのは,「ものづくり」に限った話ではありません.「数学」や「物理」も物事を考え,理解するために必要な材料や道具だと考えれば,いま学校で学んでいることの重要性が再認識できるのではないでしょうか?(残念なことに,これらはロボット製作のように直ぐに形になったり,動作(成果)を確認することができませんが・・・)
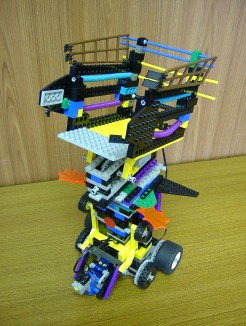
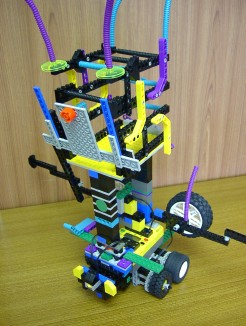
レゴロボットを組み立て初めてから,オリジナルロボットで競技会を実施するまで実質1日半でしたが,結構いろいろな工夫がみられました.こちらから指示をしなくても,こういったアイデアが出てくるのを見ていると我々も嬉しくなります(普通の講義でもこのようなノリがあるとよいのですが・・・).
以下に,いくつか競技会で目に留まった内容を紹介します.
まず,ライントレースの基本プログラムに改良が見られました.サンプルとしてこちらから説明したプログラムでは,ローバーの左右のタイヤは同時に動くことが絶対にありません. 厳密には,プログラムではライントレースではなく,エッジトレースを行っており,例えば光センサーに反射して戻ってくる光が暗くなれば右ターン,明るくなれば左ターンという動作をさせています.この方式はセンサーの閾値が1つ(条件判断が1つ)で,左右のタイヤが同時に動くこと,すなわち直進状態がありませんから,直線部分でもぎこちない動きでスピードが出ません.これを改良して閾値を2つ(条件判断が2つ)にして,明暗の中間状態で直進するようにすると動きが滑らかになり少しスピードが上がります. 閾値設定のさじ加減が難しかったと思いますが,このような工夫をしたと思われるチームがありました.
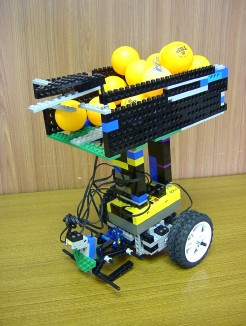
次にゴール到達を検知するタッチセンサー(スイッチ)を2つ並列に接続していたチームがありました.フォールトトレランス(Fault Tolerance)の考え方で,一つのセンサーが故障しても,もう一つのセンサーが補うという,多重系,冗長系による信頼度向上のための工夫がなされていました.目立たないところですが,関心させられました.
ボールをゴールに入れる機構にも様々な工夫がありました.特に教えた訳でもありませんが,ウォームギアの特性をうまく利用していたチームなど,各チームの特徴がよく現れていました. 時間が足りなかったこともありますが,欲を言えば動作の再現性や信頼性にもう少し工夫の余地があったのではと思いました.
- 小林 正
- 創造の壁
短い製作期間でしたが,振り返ってみて下さい.
最初,CD-ROMのチュートリアルに従ってマインドストームの動かし方を勉強しました.
そのときは,面白いおもちゃとして盛り上がったチームも多かったと思います.
CD-ROMに言われるままに動かすのは,そんなに難しいことではありません.
ところが,チュートリアルが終わって課題のロボットを作りはじめると,いきなり壁にぶつかったと思います.
すなわち,課題を解決する答えが書いてある本がありません.
そして,自分でアイデアが思い付かない,アイデア通りにロボットが動いてくれないetc. etc.これは人生の縮図でもあります.
学校では,教科書を理解し,すでに答えが分かっている問題が解ければ,よくできましたと誉められます(もちろん,解けなければ誉められません).
ところが,会社にはいって,研究したり,開発したり,あるいは生産するとき,どうしたらよいかが書いてある本とか,指示してくれるCD-ROMはありません.
すべて自分で考え,自分で壁を乗り越えなければなりません.
壁を乗り越えられれば..,乗り越えられなければ...,これ以上は恐ろしくて書けません.
また,「そんな難しい仕事は,どうせ誰もできないだろう」と思っていたことを他人ができてしまうと,自分が大変なことになります.どう大変かもここでは書けません.
「難しくてどうせ誰もできないだろう」と考えた瞬間負けです.だったら「全部自分で考えるから大学の勉強なんか要らないや」は,ないです.
画期的な製品も,その根底には従来の法則や,製品・部品が使われています.
新製品 = 従来技術・知識 + α
「従来技術・知識」とは,授業のことね.
ただし,それは知識であって,単純記憶ではありません.
また,知識は,いつ必要になるかわかりません.
例えば,アインシュタインの特殊相対性理論や一般相対性理論なんか実生活では関係ないと思っているかもしれませんが,実はカーナビで使われています.
カー・ナビゲーション・システムなどで使われる全地球測位システム(Global Positioning System, GPS)では,非常に正確な時間情報が必要になります.このGPS衛星は,速度約4 km/s,高度約20,000 kmで地球の周りを周回しています.衛星が高速で運動していることから特殊相対性理論の効果を,そして地上より弱い地球重力の影響で一般相対性理論の効果を受けますので,その補正を行なわないと正確な時間情報は得られないそうです.
カー・ナビゲーション・システムは,これらの理論がなかったら成り立たなかった技術です.
特殊相対性理論や一般相対性理論を自分で考えますか?
「従来技術・知識」まで全部自分で考えていたら,一生かかっても新製品はできません.そして「+ α」の部分が自分で考えるところです.
「どーせ大学で勉強したことなんか会社では使わないから」というのは,大いなる幻影です(私は,会社経験者).