

- TOP >
- 在学生用ページ >
- LEGOロボット競技会 >
- 物理工学セミナー2017 >
- LEGO2017
物理工学セミナー2017
LEGO2017
LEGO2017LEGOロボット競技会 2017
--- 三重大学工学部 物理工学科 物理工学セミナー ---
<課題>
スタートエリアからスタートし,ピンポン玉を自陣に引き入れる数を競う.
詳細
<結果>
エントリーNo. 1
チーム名:Sapphire(サファイア)
ロボット:Yellow Sapphire(イエロー サファイア)
目標/ロボットの特徴:
目標ポイント:16
目標タイム:50秒
目標順位:6位
アクリル板を登り、上の4つを回収し、その後下のボールを回収します。
コースを何周もしてボールを全て出します。 当然優勝狙いです。
記 録:10位
スコア:10
タイム:54.32

エントリーNo. 2
チーム名:FFM(エフエフエム)
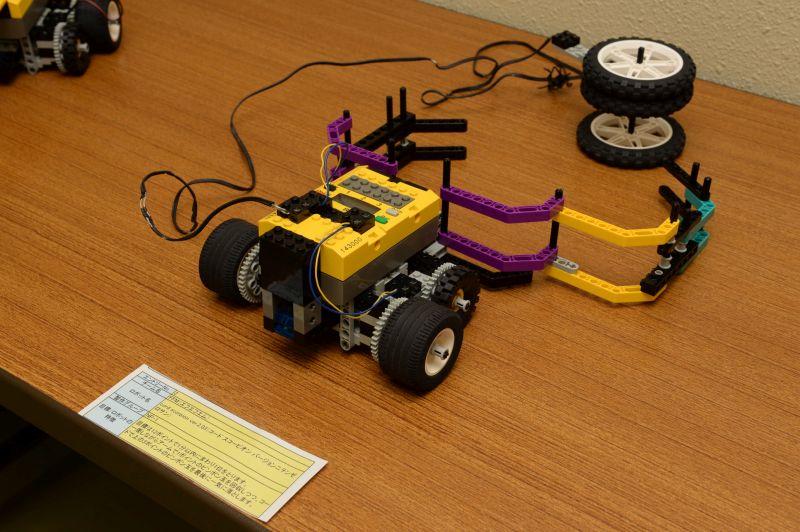
ロボット:cord scorpion ver.2.03(コード スコーピオン バージョンニテンゼロサン)
目標/ロボットの特徴:
目標は12ポイントで1分以内にまわり1位をとります。
一周しながらアームで1ポイントのピンポン玉を回収しつつ、コードで
上の3ポイントのピンポン玉を最後に一気に落とします。
記 録:15位
スコア:0
タイム:
エントリーNo. 3(決勝進出)
チーム名:省エネとりお(ショウエネトリオ)
ロボット:Beauty and Beast(ビューティーアンドビースト)
目標/ロボットの特徴:
目標:最低予選突破 13ポイント 5位
ロボットの特徴:長い角→前後ろでバランスをとる
愛らしい目→愛嬌
確実性を重視したゆっくりロボット
記 録:8位
スコア:13
タイム:14.47

エントリーNo. 4(決勝進出)決勝第3位
チーム名:nanoRIPER (ナノライパー)
ロボット:Hercules (ヘラクレス)
目標/ロボットの特徴:
大きくて立派な突起物を突き出して真ん中の12点を蹂躙し、
申し訳程度についたクワガタデバイスでついでに手前2点を
かっさらい荒々しく場を去るアクロボット変異種。
記 録:5位
スコア:13
タイム:4.62

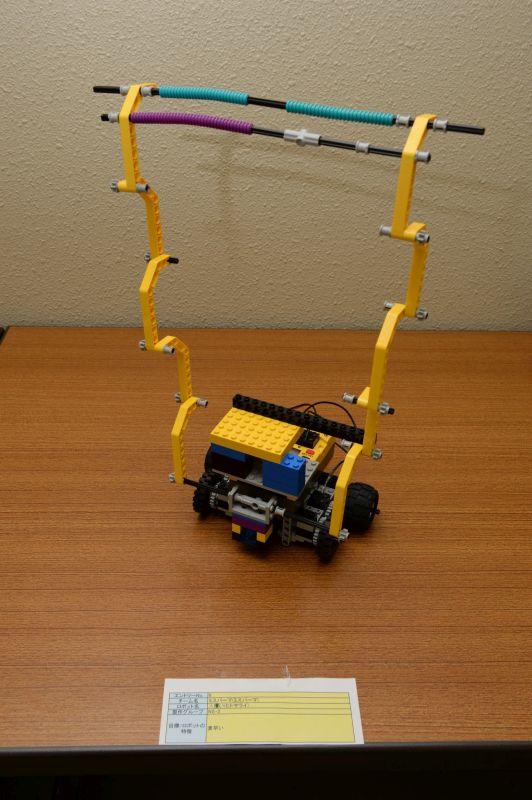
エントリーNo. 5
チーム名:Your name(キミノナハ)
ロボット:極楽湯のサウナ(ゴクラクユノサウナ)
目標/ロボットの特徴:
ツノのようなアームで上段の玉をかっさらいます
記 録:11位
スコア:8
タイム:28.74

エントリーNo. 6(決勝進出)
チーム名:ミスパーマ(ミスパーマ)
ロボット:人攫い(ヒトサライ)
目標/ロボットの特徴:
素早い
記 録:7位
スコア:13
タイム:12.78
エントリーNo. 7(決勝進出)決勝第4位
チーム名:haku(ハク)
ロボット:ベガ(ベガ)
目標/ロボットの特徴:
目標は予選通過
大きな爪?と足?が特徴
記 録:3位
スコア:14
タイム:14.49

エントリーNo. 8
チーム名:montblanc(モンブラン)
ロボット:Kabutomushi(カブトムシ)
目標/ロボットの特徴:
目標 絶対優勝☆
特徴 10秒以内に全て終わらせます。
記 録:9位
スコア:10
タイム:7.46

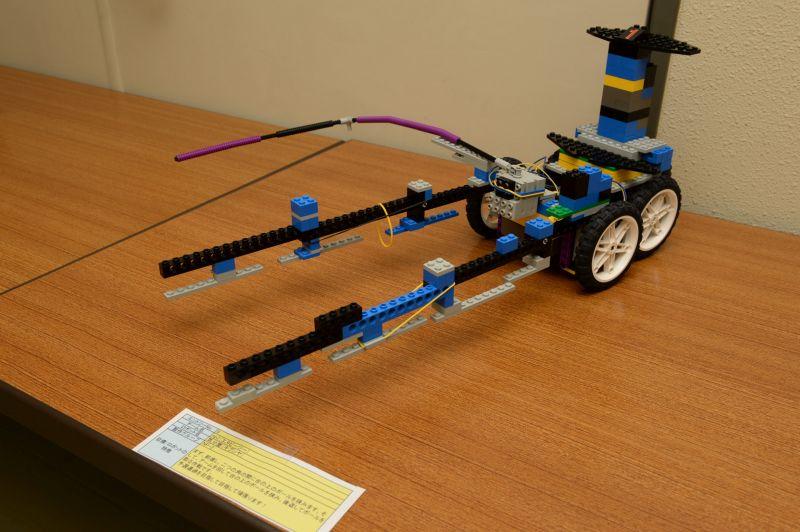
エントリーNo. 9
チーム名:np2(エヌピーツー)
ロボット:気分屋(キブンヤ)
目標/ロボットの特徴:
まず、前進し、二つの角の間に台の上のボールを挟みます。
そして、アームを回して台の上のボールを挟み、後退してボールを取る作戦です。
予選通過を目指して目指して頑張ります!
記 録:12位
スコア:7
タイム:12.97
エントリーNo. 10(決勝進出)
チーム名:Clime(クライム)
ロボット:Devil Bat Fire(デビルバットファイア)
目標/ロボットの特徴:
目標ポイント 15ポイント
タイム 5秒
順位 1位
速攻でコンパネボードに登り12点を取り、手前下の3点を取る。
記 録:6位
スコア:13
タイム:7.92

エントリーNo. 11
チーム名:sirobudou(シロブドウ)
ロボット:FB3(エフビースリー)
目標/ロボットの特徴:
目標 13点 優勝
構造上前進と後退しかしませんが優勝目指して頑張ります。
記 録:13位
スコア:7
タイム:20.57

エントリーNo. 12(決勝進出)
チーム名:MOE(モエ)
ロボット:MISS PARMA(ミス パーマ)
目標/ロボットの特徴:
目標は瞬殺で3ポイントボールをすべて取る。
アームですべてを吹き飛ばす。トルネード。
記 録:4位
スコア:13
タイム:4.03
エントリーNo. 13(決勝進出)優勝
チーム名:MMY (エムエムワイ)
ロボット:Arm Robot (アームロボット)
目標/ロボットの特徴:
目標 14点 優勝
特徴 コンパネボードにぶつかってアームが降りてピンポン球を回収します。
記 録:2位
スコア:14
タイム:4.07
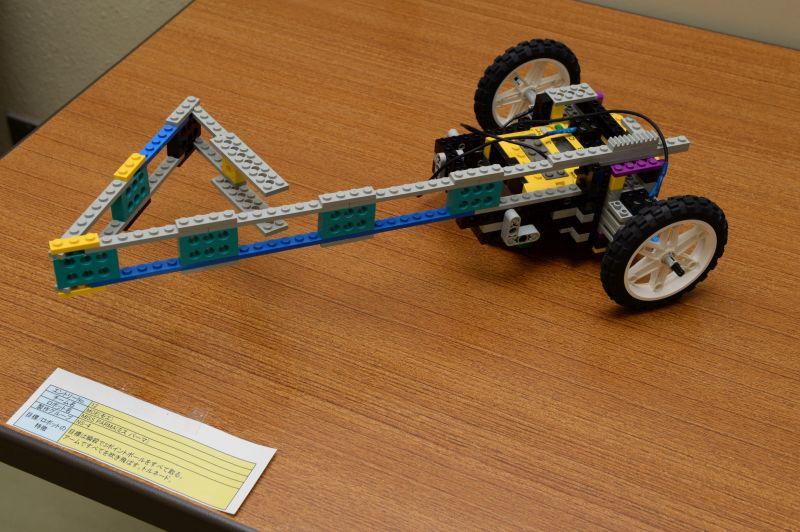
エントリーNo. 14(決勝進出)準優勝
チーム名:GGR(ジージーアール)
ロボット:フック(フック)
目標/ロボットの特徴:
台上のピンポン玉を取りに行って、帰りに地面にある玉もついでにもって帰ります。
記 録:1位
スコア:16
タイム:15.03

エントリーNo. 15
チーム名:Soft On Demand(ソフトオンデマンド)
ロボット:みんな大好き!!!MM号(ミンナダイスキ!!!エムエムゴウ)
目標/ロボットの特徴:
目標 13点を確実に取って優勝目指します。
特徴 ロボット左側につけた大型のフックが自慢です。
記 録:15位
スコア:0
タイム:

エントリーNo. 16
チーム名:ボブ(ボブ)
ロボット:ポチ(ポチ)
目標/ロボットの特徴/開発エピソード:
後ろのアームで三点の玉を取り
前のアームで外の玉を集め回ります!
記 録:14位
スコア:1
タイム:19.36
