

- TOP >
- 在学生用ページ >
- LEGOロボット競技会 >
- 物理工学セミナー2017 >
- rule >
- LEGOロボット競技会ルール
rule
LEGOロボット競技会ルール
2017年物理工学セミナー LEGOロボット競技会ルール
2017年物理工学セミナー
LEGOロボット競技会ルール
2017年7月26日(水)14:40より工学部情報工学科棟1F多目的会議室において
物理工学科LEGOロボット競技会を開催します.
見学自由ですので,学生達が作成したロボットの競技をご覧ください.
過去の競技の様子はこちら(競技会の写真や動画があります.)
製作したロボットおよび競技会の写真,動画を学科ホームページに
掲載する予定ですのであらかじめご了承下さい.
一般の方もご参加いただけます.
ご希望の方は松井正仁(matsui@phen.mie-u.ac.jp)まで
2017/07/19更新
| 競技内容 | スタートエリアからスタートし,ピンポン玉を自陣に引き入れる数を競う. |
| ロボット | 1. レゴマインドストームズ RIS,レゴマインドストームズロボスポーツ,レゴマインドストームズエクストリームクリーチャー の各1セットに含まれる部品のみを使用する. 2. 競技におけるRCXの動力源は電池とする. 3. モーター,RCX,電池,およびレゴブロックの改造をしてはいけない. 4. 瞬間接着剤およびテープなどを使い,本体の補強をしてはいけない. 5. 競技開始時においてルールの規定に合う大きさであること. 6. 競技に使用するプログラムは事前に用意した4つのプログラムの中から好きなものを選択できる. 7. 競技会当日のエントリー終了後はプログラム,ロボットの変更は認めない (部品が脱落した際の復元のみ認める). |
| 競技場 |
1. アクリルボード(917 x 917 x 2)6枚,コンパネボード(300 x 215 x 18),ピンポン玉,ペットボトルの蓋を使って図1および図2に示すような競技場を設置する. |
| 予選 |
1. スタートエリアにロボットを設置する(スタートエリアからはみ出してはいけない.).黒テープ上はスタートエリアに含まない. |
| 予選順位 |
1. 競技終了時に自陣に全体が入っているピンポン玉の合計点数により,順位を決定する. |
| 決勝 |
|
| 決勝勝敗 | 1. 競技終了時に自陣に全体が入っているピンポン玉の合計点数により勝者を決定する. 2. 黒線のないピンポン玉は1点,黒線入りピンポン玉は3点とする. 3. 同点の場合は競技者の終了宣言までの時間で順位を決定する. 4. 上記で勝者が決められない場合は再試合とする.再試合の判断は審判が行う. |
| 注意 | 競技場やルールの細目については,不備および不都合などがあれば変更するので,常時このページで確認すること.ルールに関する質問と回答を参照してください. |
{kind=link}
ルールに関する質問と回答
質問:ロボットの項目「5.競技開始時においてルールの規定に合う大きさであること.」とは具体的にどういうことですか?
回答:「スタート時にスタートエリアからはみ出さない大きさであること」です.
質問:決勝勝敗の項目「4.上記で勝者が決められない場合は再試合とする.」とありますが,再試合は勝者が決まるまで何度も行うのですか?
回答:再試合は1回とし,勝者が決められない場合は予選順位上位チームを勝者とします.
質問:決勝勝敗の項目「3.同点の場合は競技者の終了宣言までの時間で順位を決定する.」とありますが,両者が0点だった場合もそうですか?
回答:両者が0点の場合は終了宣言までの時間に関わらず再試合とします.
実験担当者:松井正仁(matsui@phen.mie-u.ac.jp)・中村裕一
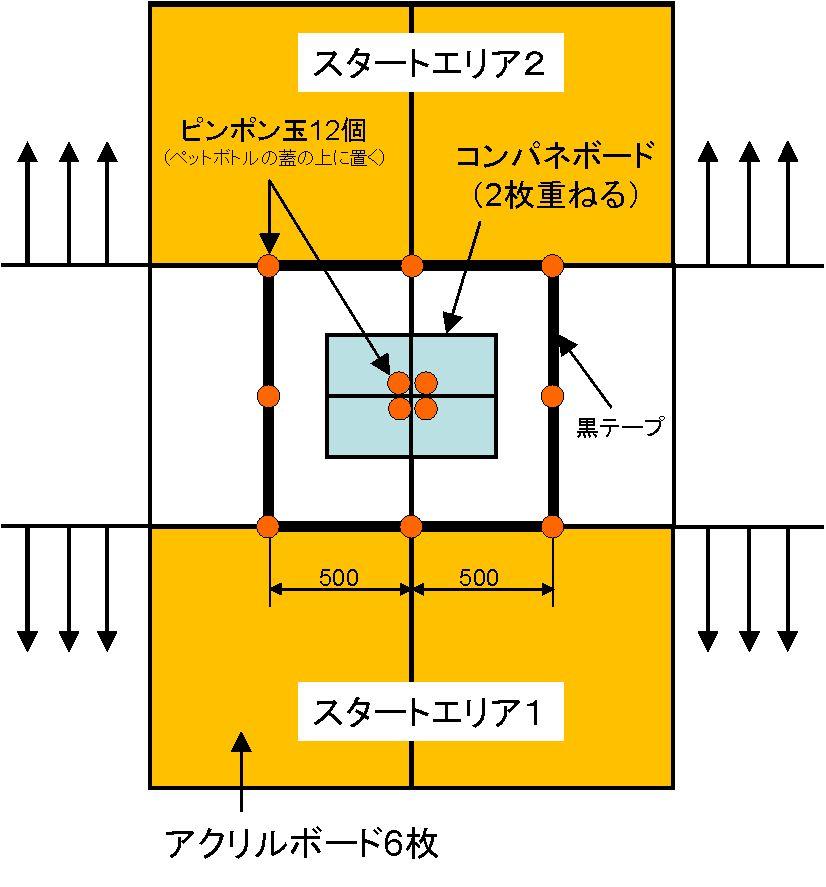
図1 競技場

図2 競技場全体写真

図3 コンパネボードの2個一体化
(貼り付け位置を明確にするためテープは黒色のものを利用.
実際はscotchの透明テープを使用する)
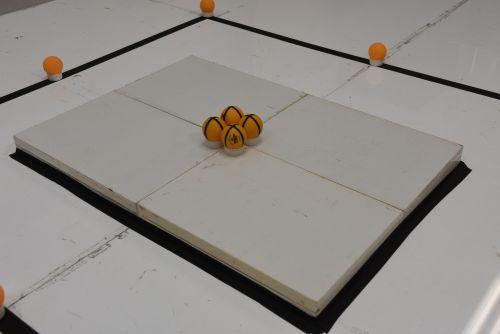
図4 コンパネボードのアクリルボードへの固定
(貼り付け位置を明確にするためテープは黒色のものを利用.
実際はscotchの透明テープを使用する)
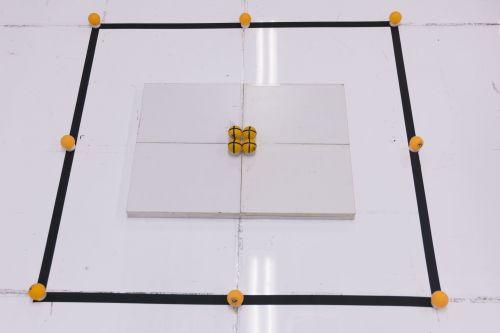
図5 ピンポン玉の配置方法